About
Welcome to the 2025 Workshop on Machine Learning for Autonomous Driving at AAAI.
Autonomous vehicles (AVs) offer a rich source of high-impact research problems for the machine learning (ML) community; including perception, state estimation, probabilistic modeling, time series forecasting, gesture recognition, robustness guarantees, real-time constraints, user-machine communication, multi-agent planning, and intelligent infrastructure. Further, the interaction between ML subfields towards a common goal of autonomous driving can catalyze interesting inter-field discussions that spark new avenues of research, which this symposium aims to promote. As an application of ML, autonomous driving has the potential to greatly improve society by reducing road accidents, giving independence to those unable to drive, and even inspiring younger generations with tangible examples of ML-based technology clearly visible on local streets. All are welcome to attend! This will be the 8th event in this series. Previous events in 2016, 2017, 2018, 2019, 2020, 2021, 2022, 2023 enjoyed wide participation from both academia and industry.
Attending: • Attend (in person or virtual): please register here • Authors: please bring a poster up to 30 x 40 inches either portrait or landscape
Speakers
-

Guy Rosman
Senior Manager
Toyota Research Institute -
Wei Zhan
Co-Director of Berkeley DeepDrive and Chief Scientist of Applied Intuition
UC Berkeley and Applied Intuition
-

Somil Bansal
Assistant Professor
Stanford University -

John Dougherty
Software and Simulation Lead, Autonomous Driving
Qualcomm
Schedule
Tuesday 4th March 2025. All times are in Eastern Standard Time (UTC-5). Current time is
| Time | Event | Title |
|---|---|---|
| 09:00 | Welcome | Welcoming Remarks: Paul Tylkin |
| 09:15 |
Guy Rosman
Toyota Research Institute
|
Machine Learning for Interactive Driving |
| 09:45 | Lightning Talks | Lightning Talks: 5 minutes per paper |
| 10:15 | Posters and Social Break | |
| 11:45 | Lunch | |
| 13:30 |
Wei Zhan
UC Berkeley and Applied Intuition
|
Scalable and Generalizable Neural Simulation |
| 14:00 |
Somil Bansal
Stanford University
|
Continual Safety Assurances for Autonomous Driving |
| 14:30 | Posters and Social Break | |
| 15:15 |
John Dougherty
Qualcomm
|
Snapdragon Ride Automated Driving Technology |
| 15:45 | Awards | Award Ceremony: Alex Petiushko |
| 16:15 | Panel | Panel discussion: Guy Rosman, Somil Bansal, Alex Petiushko, Paul Tylkin (moderator) |
| 17:00 | Close | Closing Remarks: Paul Tylkin |
Papers
Rolling Ahead Diffusion for Traffic Scene Simulation
Yunpeng Liu, Matthew Niedoba, William Harvey, Adam Ścibior, Berend Zwartsenberg, Frank Wood
Teacher-guided Off-road Autonomous Driving
Vedant Mundheda*, Zhouchonghao Wu*, Jeff Schneider
CRASH: Challenging Reinforcement-Learning Based Adversarial Scenarios For Safety Hardening
Amar Kulkarni, Shangtong Zhang, Madhur Behl
From One to the Power of Many: Invariance to Multi-LiDAR Perception from Single-Sensor Datasets
Marc Uecker, J. Marius Zöllner
From Dashcam Videos to Driving Simulations: Stress Testing Automated Vehicles against Rare Events
Yan Miao, Georgios Fainekos, Bardh Hoxha, Hideki Okamoto, Danil Prokhorov, Sayan Mitra
A Spatiotemporal Approach to Tri-Perspective Representation for 3D Semantic Occupancy Prediction
Sathira Silva*, Savindu Wannigama*, Gihan Jayatilaka, Muhammad Haris Khan, Roshan Ragel
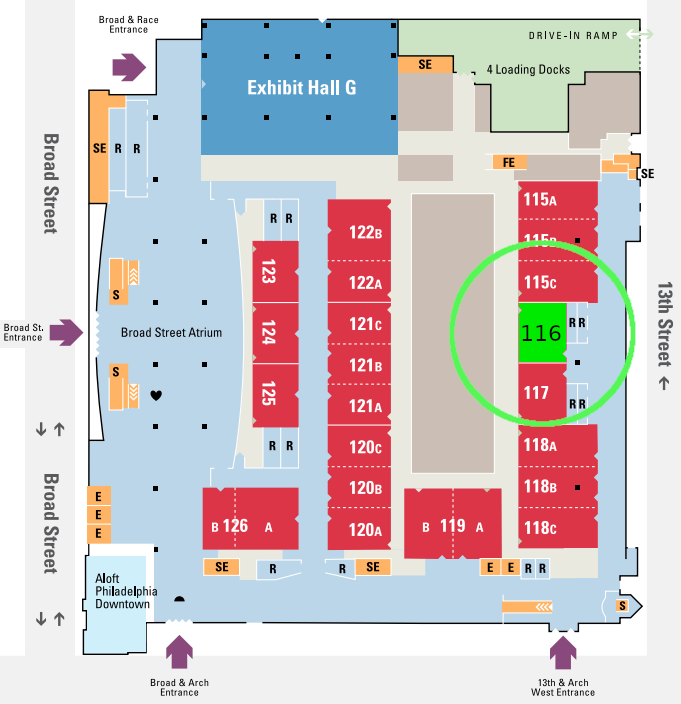
Location
Room 116 Pennsylvania Convention Center 1101 Arch St, Philadelphia, PA 19107, United States
Organizers
-

Paul Tylkin paul.tylkin@tri.global
is a Senior Research Scientist at Toyota Research Institute.
-

Maximilian Naumann Maximilian.Naumann@de.bosch.com
is a research engineer and project lead at Bosch Center for Artificial Intelligence.
-

Madhumitha Sakth msakthi@qti.qualcomm.com
is a senior engineer at Qualcomm.
-
Jiachen Li jiachen.li@ucr.edu
is an assistant professor at the University of California, Riverside.
-

Aman Sinha thisisaman@waymo.com
is a research scientist at Waymo.
-

Marco Pavone pavone@stanford.edu
is an Associate Professor at Stanford University and a Distinguished Research Scientist at NVIDIA.
-

Rowan McAllister mcallister@waymo.com
is a staff research scientist at Waymo.
Program Committee
Thank you to those who helped make this workshop possible!
•
Reinis Cimurs, Bosch
•
Nemanja Djuric, Aurora
•
Andreas Look, Bosch
•
Alexander Meade, Waymo
•
Aleksandr Petiushko, Gatik AI
•
Toan Tran, Emory University
•
Akos Utasi, Continental Corporation
•
Yuping Wang, Waymo
•
Amir Yazdani, Gatik AI
•
Chengyuan Zhang, McGill University
Sponsors
We thank Toyota Research Institute and Gatik for generously sponsoring this event.

