About
Welcome to the NeurIPS 2022 Workshop on Machine Learning for Autonomous Driving!
Autonomous vehicles (AVs) offer a rich source of high-impact research problems for the machine learning (ML) community; including perception, state estimation, probabilistic modeling, time series forecasting, gesture recognition, robustness guarantees, real-time constraints, user-machine communication, multi-agent planning, and intelligent infrastructure. Further, the interaction between ML subfields towards a common goal of autonomous driving can catalyze interesting inter-field discussions that spark new avenues of research, which this workshop aims to promote. As an application of ML, autonomous driving has the potential to greatly improve society by reducing road accidents, giving independence to those unable to drive, and even inspiring younger generations with tangible examples of ML-based technology clearly visible on local streets. All are welcome to attend! This will be the 7th NeurIPS workshop in this series. Previous workshops in 2016, 2017, 2018, 2019, 2020, 2021 enjoyed wide participation from both academia and industry.
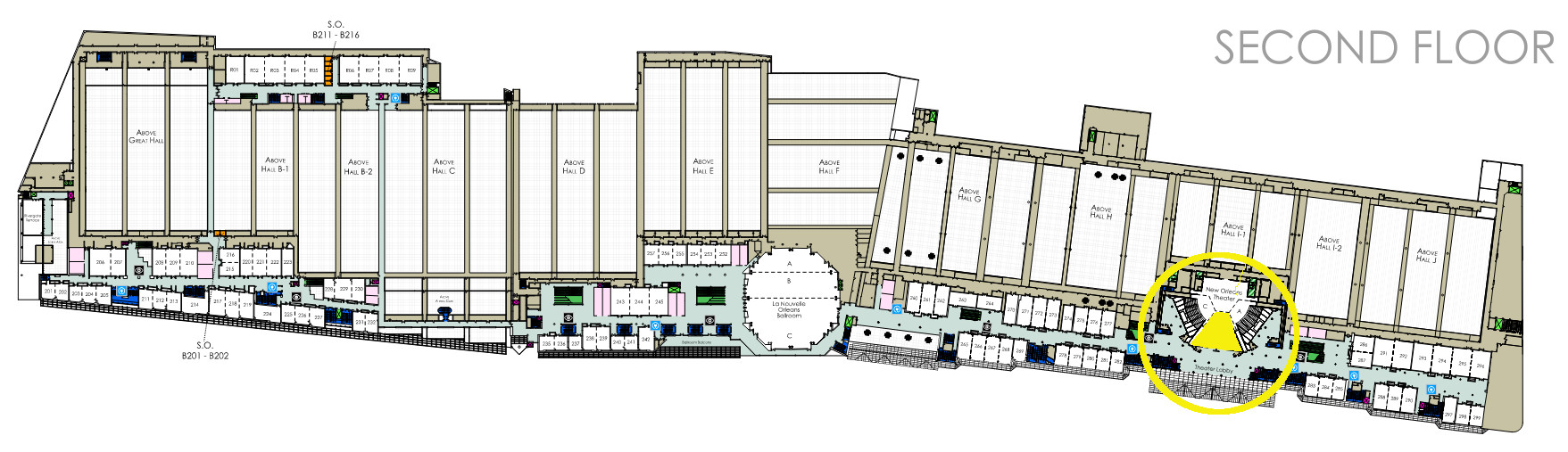
Attending: 1. Register for NeurIPS 2. Authors bring or print a poster onsite (use thin paper, not laminated, and no larger than 24 inches wide x 36 inches high) 3a. Attend in person: Come find us in Theater B located on the 2nd floor of the New Orleans Convention Center 3b. Attend virtually: Watch talks live from our NeurIPS Portal, ask questions in the "Chat" window, and meet authors at our Gather Town poster sessions at 10:15, 12:10, 14:10 CST
Travel Awards: you can apply for financial support to attend our workshop here.
Contact: ml4ad2022@googlegroups.com
Post Event: all videos now avilable on SlidesLive and YouTube
Dates
Papers
Challenge
Workshop
Speakers
Morning speakers
-
Hang Zhao
Assistant Professor
Tsinghua University -
Bo Li
Assistant Professor
University of Illinois, Urbana-Champaign -

Bolei Zhou
Assistant Professor
University of California, Los Angeles -
Yuning Chai
Head of AI Research
Cruise
Afternoon speakers
-

Nick Rhinehart
Postdoctoral Researcher
University of California, Berkeley -
Liting Sun
Research Scientist
Waymo -

Stewart Worrall
Senior Research Fellow
The University of Sydney
Submissions
Submission deadline: 1st October 2022 at 23:59 Anywhere on Earth
Submission website: https://cmt3.research.microsoft.com/ML4AD2022
Submission format: either extended abstracts (4 pages) or full papers (8 or 9 pages) anonymously using:
• neurips_2022_ml4ad.tex -- LaTeX template
• neurips_2022_ml4ad.sty -- style file for LaTeX 2e
• neurips_2022_ml4ad.pdf -- example PDF output
References and appendix should be appended into the same (single) PDF document, and do not count towards the page count.
We invite submissions on machine learning applied to autonomous driving, including (but not limited to):
• Supervised scene perception and classification
• Unsupervised representation learning for driving
• Behavior modeling of pedestrians and vehicles
• Gesture recognition
• Uncertainty propagation through AV software pipelines
• Metrics for autonomous driving
• Benchmarks for autonomous driving
• Real-time inference and prediction
• Causal modeling for multi-agent traffic scenarios
• Robustness to out-of-distribution road scenes
• Imitative driving policies
• Transfer learning from simulation to real-world (Sim2Real)
• Coordination with human-driven vehicles
• Coordination with vehicles (V2V) or infrastructure (V2I)
• Explainable driving decisions
• Adaptive driving styles based on user preferences
FAQ
Q: Will there be archival proceedings?
A: No. Neither 4 or 8 or 9 page submissions will be indexed nor have archival proceedings.
Q: Should submitted papers be anonymized?
A: Yes. If accepted, we will ask for a de-anonymized version to link on the website.
Q: My papers contains ABC, but not XYZ, is this good enough for a submission?
A: Submissions will be evaluated based on these reviewer questions.
Schedule
Saturday, December 3rd, 2022. All times are in Central Standard Time (UTC-6). Current time is
Challenge

The CARLA Autonomous Driving Challenge 2022 winners will present their solutions as part of the workshop. Details here.
Papers
Extended Abstracts
Risk Perception in Driving Scenes
Nakul Agarwal, Yi-Ting Chen
paper |
poster B2 |
youtube
Multi-Modal 3D GAN for Urban Scenes
Loïck Chambon, Mickael Chen, Tuan-Hung Vu, Alexandre Boulch, Andrei Bursuc, Matthieu Cord, Patrick Pérez
paper |
poster B9 |
slideslive
DriveCLIP: Zero-Shot Transfer for Distracted Driving Activity Understanding using CLIP
Md Zahid Hasan, Ameya Joshi, Mohammed Rahman, Archana Venkatachalapathy, Anuj Sharma, Chinmay Hegde, Soumik Sarkar
paper |
poster C2 |
slideslive
Are All Vision Models Created Equal? A Study of the Open-Loop to Closed-Loop Causality Gap
Mathias Lechner, Ramin Hasani, Alexander Amini, Tsun-Hsuan Wang, Thomas Henzinger, Daniela Rus
paper |
poster C9 |
slideslive
Rationale-aware Autonomous Driving Policy utilizing Safety Force Field implemented on CARLA Simulator
Ho Suk*, Taewoo Kim*, Hyungbin Park, Pamul Yadav, Junyong Lee, Shiho Kim
paper |
poster B1 |
slideslive |
youtube
Full Papers
Monitoring of Perception Systems: Deterministic, Probabilistic, and Learning-based Fault Detection and Identification
Pasquale Antonante, Heath Nilsen, Luca Carlone
paper |
poster B7 |
slideslive |
youtube
VN-Transformer: Rotation-Equivariant Attention for Vector Neurons
Serge Assaad, Carlton Downey, Rami Al-Rfou, Nigamaa Nayakanti, Benjamin Sapp
paper |
poster A2 |
slideslive |
youtube
Controlling Steering with Energy-Based Models
Mykyta Baliesnyi, Ardi Tampuu, Tambet Matiisen
paper |
poster A1 |
youtube
Verifiable Goal Recognition for Autonomous Driving with Occlusions
Cillian Brewitt, Massimiliano Tamborski, Stefano Albrecht
paper |
poster D6 |
slideslive
Robust Trajectory Prediction against Adversarial Attacks
Yulong Cao, Danfei Xu, Xinshuo Weng, Zhuoqing Mao, Anima Anandkumar, Chaowei Xiao, Marco Pavone
paper |
poster A7 |
slideslive |
youtube
AdvDO: Realistic Adversarial Attacks for Trajectory Prediction
Yulong Cao, Chaowei Xiao, Anima Anandkumar, Danfei Xu, Marco Pavone
paper |
poster A6 |
slideslive |
youtube
Improving Motion Forecasting for Autonomous Driving with the Cycle Consistency Loss
Titas Chakraborty, Akshay Bhagat, Henggang Cui
paper |
poster B5 |
slideslive |
youtube
VISTA: VIrtual STereo based Augmentation for Depth Estimation in Automated Driving
Bin Cheng, Kshitiz Bansal, Mehul Agarwal, Gaurav Bansal, Dinesh Bharadia
paper |
poster B3 |
slideslive |
youtube
Finding Safe Zones of Markov Decision Processes Policies
Lee Cohen, Yishay Mansour, Michal Moshkovitz
paper |
poster C8 |
slideslive |
youtube
One-Shot Learning of Visual Path Navigation for Autonomous Vehicles
Zhongying CuiZhu*, Francois Charette*, Amin Ghafourian*, Debo Shi, Matthew Cui, Anjali Krishnamachar, Iman Bozchalooi
paper |
poster A5 |
slideslive |
youtube
Stress-Testing Point Cloud Registration on Automotive LiDAR
Amnon Drory, Raja Giryes, Shai Avidan
paper |
poster D1 |
slideslive |
youtube
KING: Generating Safety-Critical Driving Scenarios for Robust Imitation via Kinematics Gradients
Niklas Hanselmann, Katrin Renz, Kashyap Chitta, Apratim Bhattacharyya, Andreas Geiger
paper |
poster D7 |
slideslive |
youtube
Fast-BEV: Towards Real-time On-vehicle Bird's-Eye View Perception
Bin Huang*, Yangguang Li*, Enze Xie*, Feng Liang*, Luya Wang, Mingzhu Shen, Fenggang Liu, Tianqi Wang, Ping Luo, Jing Shao
paper |
poster D8 |
slideslive
DiffStack: A Differentiable and Modular Control Stack for Autonomous Vehicles
Peter Karkus, Boris Ivanovic, Shie Mannor, Marco Pavone
paper |
poster D5 |
slideslive |
youtube
An Intelligent Modular Real-Time Vision-Based System for Environment Perception
Amirhossein Kazerouni*, Amirhossein Heydarian*, Milad Soltany*, Aida Mohammadshahi*, Abbas Omidi*, Saeed Ebadollahi
paper |
poster A9 |
slideslive |
youtube
PolarMOT: How Far Can Geometric Relations Take Us in 3D Multi-Object Tracking?
Aleksandr Kim, Guillem Brasó, Aljoša Ošep, Laura Leal-Taixé
paper |
poster B6 |
slideslive |
youtube
TALISMAN: Targeted Active Learning for Object Detection with Rare Classes and Slices using Submodular Mutual Information
Suraj Kothawade, Saikat Ghosh, Sumit Shekhar, Yu Xiang, Rishabh Iyer
paper |
poster D2 |
slideslive |
youtube
CW-ERM: Improving Autonomous Driving Planning with Closed-loop Weighted Empirical Risk Minimization
Eesha Kumar, Yiming Zhang, Stefano Pini, Simon Stent, Ana Sofia Rufino Ferreira, Sergey Zagoruyko, Christian Perone
paper |
poster A4 |
slideslive
Missing Traffic Data Imputation Using Multi-Trajectory Parameter Transferred LSTM
Jungmin Kwon, Hyunggon Park
poster D3 |
slideslive |
youtube
Calibrated Perception Uncertainty Across Objects and Regions in Bird's-Eye-View
Markus Kängsepp, Meelis Kull
paper |
poster D4 |
slideslive |
youtube
Imitation Is Not Enough: Robustifying Imitation with Reinforcement Learning for Challenging Driving Scenarios
Yiren Lu, Justin Fu, George Tucker, Xinlei Pan, Eli Bronstein, Rebecca Roelofs, Benjamin Sapp, Brandyn White, Aleksandra Faust, Shimon Whiteson, Dragomir Anguelov, Sergey Levine
paper |
poster B4 |
slideslive
ViT-DD: Multi-Task Vision Transformer for Semi-Supervised Driver Distraction Detection
Yunsheng Ma, Ziran Wang
paper |
poster A3 |
slideslive |
youtube
Direct LiDAR-based Object Detector Training from Automated 2D Detections
Robert McCraith, Eldar Insafutdinov, Lukas Neumann, Andrea Vedaldi
paper |
poster D9 |
slideslive
Safe Real-World Autonomous Driving by Learning to Predict and Plan with a Mixture of Experts
Stefano Pini, Christian Perone, Aayush Ahuja, Ana Sofia Rufino Ferreira, Moritz Niendorf, Sergey Zagoruyko
paper |
poster C7 |
slideslive
PlanT: Explainable Planning Transformers via Object-Level Representations
Katrin Renz, Kashyap Chitta, Otniel-Bogdan Mercea, Almut Sophia Koepke, Zeynep Akata, Andreas Geiger
paper |
poster C3 |
slideslive |
youtube
Distortion-Aware Network Pruning and Feature Reuse for Real-time Video Segmentation
Hyunsu Rhee, Dongchan Min, Sunil Hwang, Bruno Andreis, Sung Ju Hwang
paper |
poster A10 |
slideslive |
youtube
Improving Predictive Performance and Calibration by Weight Fusion in Semantic Segmentation
Timo Sämann, Ahmed Mostafa Hammam, Andrei Bursuc, Christoph Stiller, Horst-Michael Groß
paper |
poster C4 |
slideslive
GNM: A General Navigation Model to Drive Any Robot
Dhruv Shah*, Ajay Sridhar*, Arjun Bhorkar, Noriaki Hirose, Sergey Levine
paper |
poster D10 |
slideslive
Enhancing System-level Safety in Autonomous Driving via Feedback Learning
Sin Yong Tan, Weisi Fan, Qisai Liu, Tichakorn Wongpiromsarn, Soumik Sarkar
paper |
poster C10 |
slideslive |
youtube
Analyzing Deep Learning Representations of Point Clouds for Real-Time In-Vehicle LiDAR Perception
Marc Uecker, Tobias Fleck, Marcel Pflugfelder, Marius Zöllner
paper |
poster C6 |
slideslive
CAMEL: Learning Cost-maps Made Easy for Off-road Driving
Kasi Viswanath, Sujit Baliyarasimhuni, Srikanth Saripalli
paper |
poster A8 |
slideslive |
youtube
A Versatile and Efficient Reinforcement Learning Approach for Autonomous Driving
Guan Wang, Haoyi Niu, Desheng Zhu, Jianming Hu, Xianyuan Zhan, Guyue Zhou
paper |
poster C5 |
slideslive
Uncertainty-Aware Self-Training with Expectation Maximization Basis Transformation
Zijia Wang, Wenbin Yang, Zhi-Song Liu, Zhen Jia
paper |
poster B10 |
slideslive |
youtube
Potential Energy based Mixture Model for Noisy Label Learning
Zijia Wang, Wenbin Yang, Zhi-Song Liu, Zhen Jia
paper |
poster C1 |
slideslive |
youtube
A Graph Representation for Autonomous Driving
Zerong Xi, Gita Sukthankar
paper |
poster B8 |
slideslive |
youtube
Location
Theater B, 2nd floor New Orleans Convention Center, 900 Convention Center Boulevard, New Orleans, Louisiana 70130, United States
Organizers
-
Jiachen Li jiachen_li@stanford.edu
is a Postdoctoral Scholar at Stanford University working on scene understanding and decision making for intelligent systems.
-

Nigamaa Nayakanti nigamaa@waymo.com
is a research scientist at Waymo working on behavior prediction and modeling for autonomous vehicles.
-

Xinshuo Weng xweng@nvidia.com
is a Research Scientist at NVIDIA Autonomous Vehicle Research working on 3D computer vision and generative models in the context of autonomous driving.
-

Daniel Omeiza daniel.omeiza@cs.ox.ac.uk
is a PhD student at the University of Oxford working on explainability in autonomous vehicles.
-

Ali Baheri ali.baheri@mail.wvu.edu
is an assistant professor at West Virginia University working on machine learning, control, and data-driven optimization.
-

German Ros german.ros@intel.com
is the lead for Intel Autonomous Agents Labs.
Challenge Organizers
-
German Ros german.ros@intel.com
is the lead for Intel Autonomous Agents Labs.
-

Guillermo Lopez
is a software engineer at CVC & Embodied AI Foundation
-

Joel Moriana
is a software engineer at CVC & Embodied AI Foundation
-

Jacopo Bartiromo
is a software engineer at CVC & Embodied AI Foundation
-

Vladlen Koltun
is a Distinguished Scientist at Apple.
Advisors
-

Rowan McAllister rowan.mcallister@tri.global
is a research scientist and manager at Toyota Research Institute working on probabilistic models and motion planning for autonomous vehicles.
Program Committee
We thank those who help make this workshop possible!
•
Aayush Ahuja
•
Maram Akila
•
Elahe Arani
•
Bahar Azari
•
Junchi Bin
•
Daniel Bogdoll
•
Jaekwang Cha
•
Changhao Chen
•
Zheng Chen
•
Wenhao Ding
•
Christopher Diehl
•
Nemanja Djuric
•
Praneet Dutta
•
Hesham Eraqi
•
Meng Fan
•
Shivam Gautam
•
Paweł Gora
•
Simon Gustavsson
•
Michael Hanselmann
•
Jeffrey Hawke
•
Hengbo Ma
•
Xiaobai Ma
•
Marcin Możejko
•
Amitangshu Mukherjee
•
Sauradip Nag
•
Maximilian Naumann
•
Patrick Nguyen
•
Yaru Niu
•
Tanvir Parhar
•
Nishant Rai
•
Gaurav Raina
•
Daniele Reda
•
Kasra Rezaee
•
Enna Sachdeva
•
Mark Schutera
•
Adam Scibior
•
Daniel Sikar
•
Apoorv Singh
•
Sahib Singh
•
Ruobing Shen
•
Tianyu Shi
•
Deepak Singh
•
Abhishek Sinha
•
Ibrahim Sobh
•
Zhaoen Su
•
Shreyas Subramanian
•
Ho Suk
•
Chen Tang
•
Toan Tran
•
Ankit Vora
•
Ákos Utasi
•
Letian Wang
•
Chenfeng Xu
•
Yan Xu
•
Xinchen Yan
•
Xi Yi
•
Senthil Yogamani
•
Jiakai Zhang
•
Jiacheng Zhu
Sponsors
We thank Waymo for generously sponsoring three student travel awards and the virtual poster session.
